It is currently 81 articles in the database.
On these pages you'll find some of my work and prosjects. Some projects are well documented, and others have more of a "notebook-style". Scribbled down, while the idea still was fresh in my head. I've tried to devide the projects into three sections:
Here goes everything else. From FreeCAD, mySQL notes, and other things I need to remember to Raspberry Pi stuff.
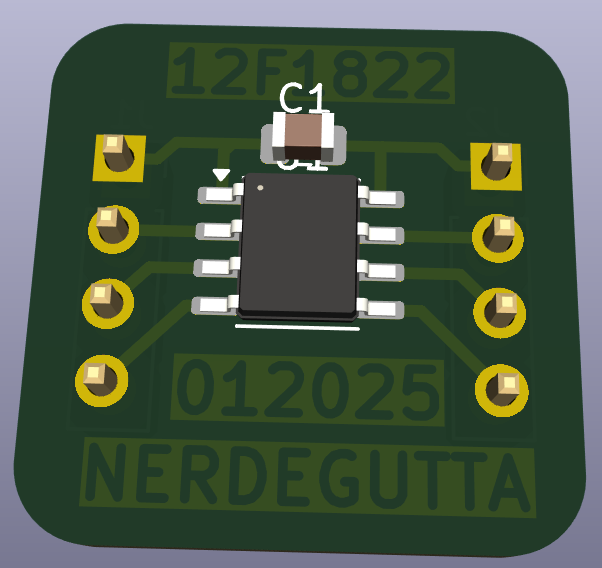
In this section you'll find circuits and board layouts. In the early days I used EagleCAD, and I liked it a lot. Then it was taken over by a big company, and they did some changes to it that I did not like. So... I switched to KiCAD.
The learning curve was somewhat steep, but I like the features that you can make your own parts, footprints, and with FreeCAD you can even make your own 3D models. This is a free software, and the more I use it, the more I learn and like it. The 3D view option is also awesome.
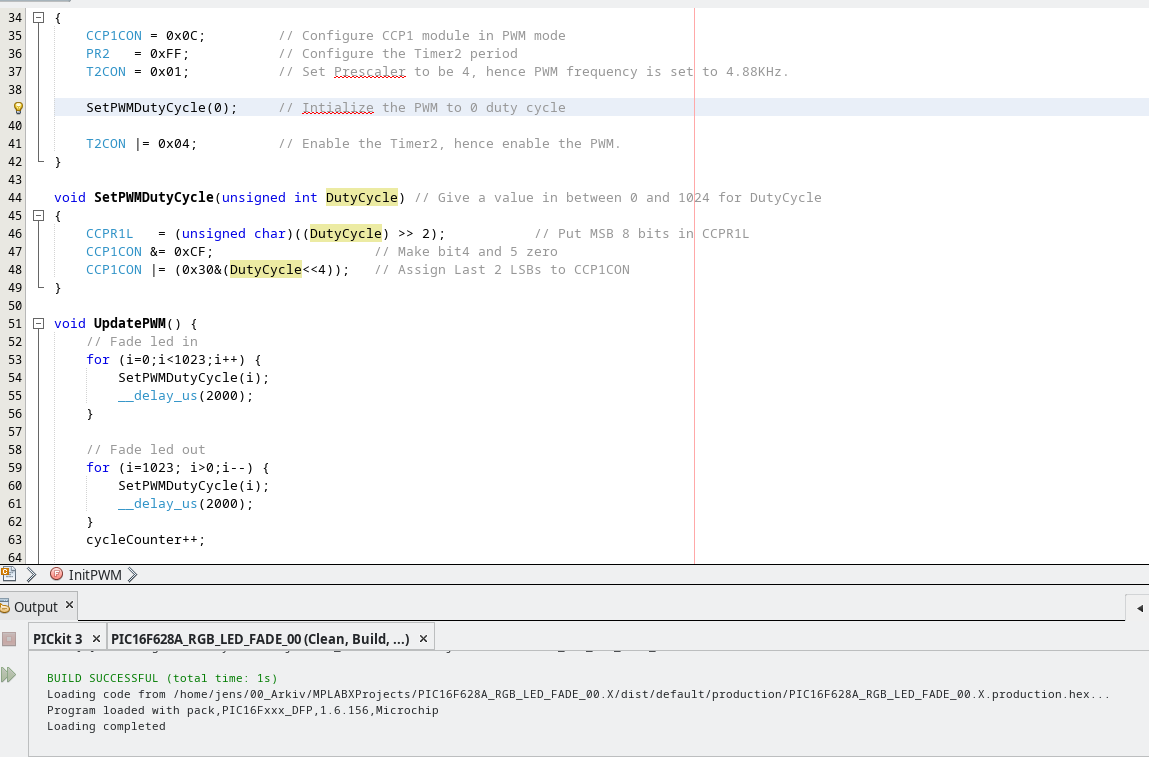
This section is dedicated to programming MCU's. Most of my embedded project are based around the PIC16 from Microchip. On rare occations I'll be using an ATMEGA. My IDE is MPLAB X. My main programming language is C.
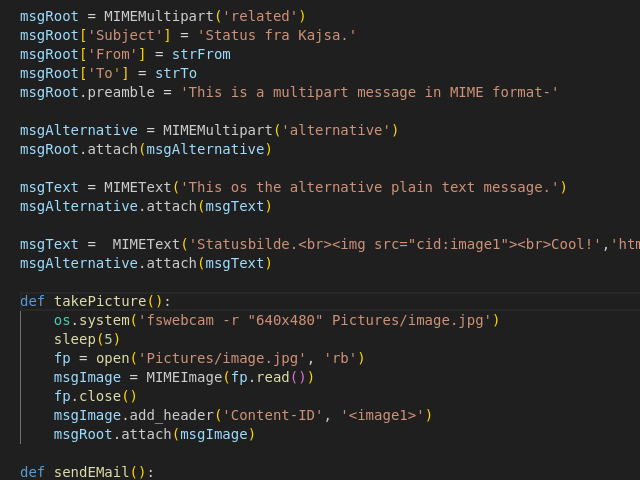
As the title says, this is the programming part of my site. This is not C/Embedded. Here goes anything else that's related to programming, such as PHP and Python. My IDE for PHP is Visual Studio Code and for Python it's Wings Personal. Sometime I use Geany. But that is more to seperate different project from each other.
nerdegutta.no